The differential is almost as old as the automobile itself and quite possible even older. Without it, it’s almost impossible to tame any double-track vehicle, so you can find one in any car. Or two… or maybe even three. Without the “diff”, we would be basically driving straight no matter where we turn the wheel. And as you’ll probably agree, that would not be very practical.
It is not known when exactly the first differential was designed and built. Some sources say it was as soon as 100 B.C., when ancient Romans used similar mechanism in naval navigation devices. However, first fully documented mechanical device with the function of differential was found in China around 1100 A.D. and it, too, was used for navigation purposes. These devices were built into finely crafter and rather bizarre two-wheeled carriages which used incredibly advanced and complicated mechanisms inside to keep their beam pointing south at all times.
Either way, and without any doubt, the first modern “car-like” differential was patented by French watchmaker Onésiphore Pecqueur in 1827 as a part of a “steam wagon” – a predecessor of today’s trucks and one of the first machines that could be considered a motor car.
Both in obscure compass carriages of China and in Pecqueur’s steam wagon, the differential served the same two purposes as in modern cars. The principle is easiest to understand on a car with longitudinally mounted engine in the front and rear wheel drive, a layout that was used for the first “real” automobiles about a century ago and which is still widely popular in automotive industry.
The first job of the differential is to split the power between the wheels and, in our model case, turn it around 90°. This could be done with a simple set of bevel gears, but then the car would tend to only go in the straight line – like on rails. By the way, the railroads traditionally tend to forgo the use of differentials, as turns usually have large radius and the friction is low enough that it isn’t worthwhile to put effort with complicated gears.
The second job of a differential is to allow the car to steer. As its name suggests, the differential solves the problem of difference between the distance travelled by the inside and outside wheel. In a turn, the inside wheel obviously travels shorter distance than the outside one, which means it has to do less revolutions.
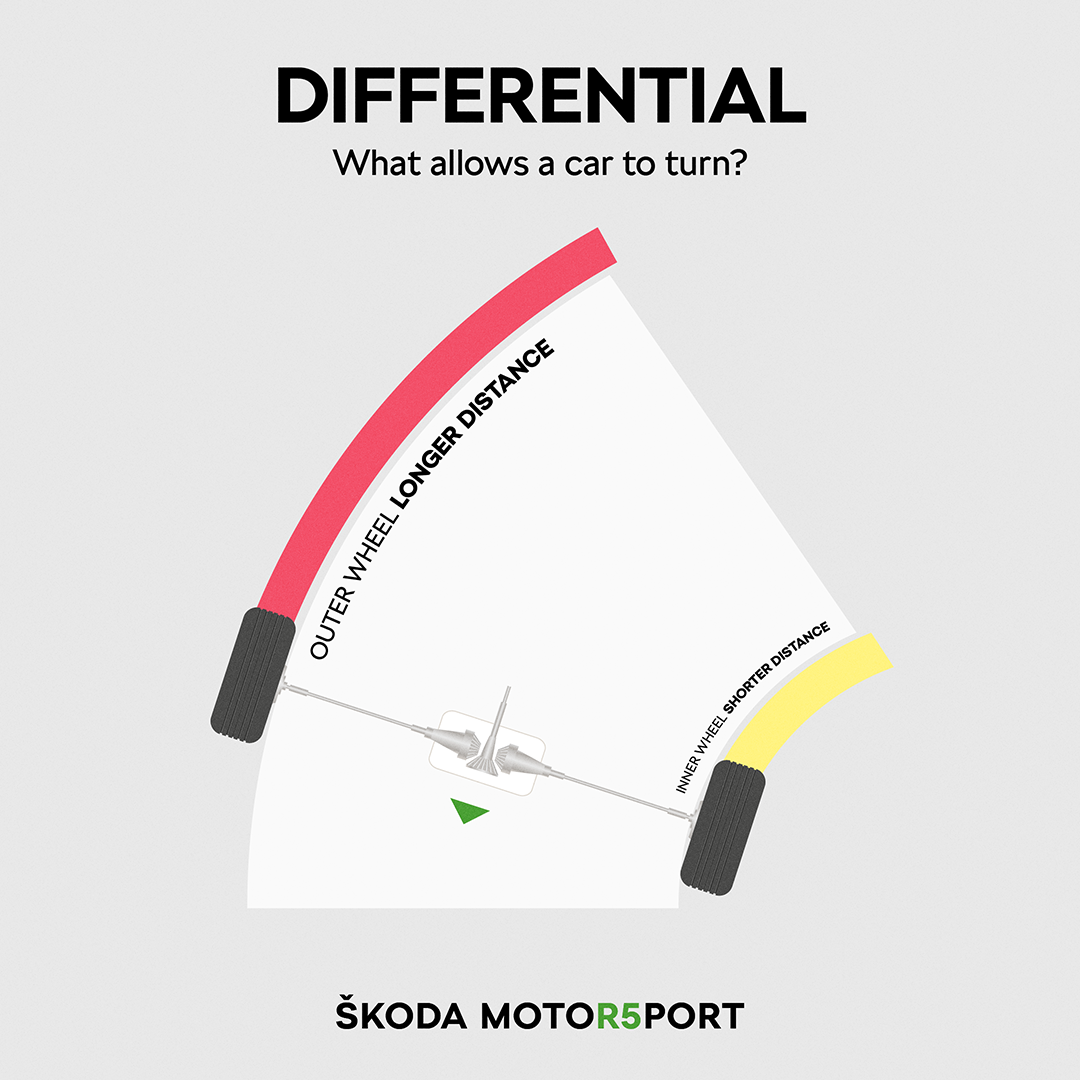
If there was no differential on the axle, both wheels would revolve at the same speed. Therefore, they would have tendency to cover the same distance as each other, which would result in tendency to go in a straight line. A car with rear wheel drive would push the front wheels, with their tyres skidding helplessly. That’s what happens to off-road vehicles if their drivers forget to switch off their rear differential lock (more about that later).
There are several possible solutions to this problem. One of them is to narrow the rear track (distance between the wheels on the rear axle), which would reduce the difference between the distances travelled by individual wheels. The narrower the track, the smaller the problem. However, with this approach, we would eventually end up with something like a Velorex or a Morgan Three-Wheeler – reducing the rear axle to a single wheel. This results in unpredictable handling and quite unpleasant tendency to turn upside down.

Another solution is to keep the two wheels with only one of them being driven. This was used on the first racecars with chain drive on the outside of the bodywork. It’s a simple design with two significant flaws. First one is that we lose 50 % of the traction, the second that the car is slower in the right-hand turn and faster in the left-hand one (or vice versa, depending on which of the wheels is driven. We can probably agree that this, too, isn’t a desirable solution when it comes to safety and handling – at least by modern standards. At the turn of the 19thand 20thcentury, many racing cars didn’t even have proper brakes (even though some reached speeds of up to 150 km/h), so why bother with a detail like uneven acceleration in the turns. The third and most elegant solution is to use differential that will allow the wheels on one axle to turn at different speeds, allowing us to send torque to both of them and propel the car forward. Clever! But how to do it?
Inside the simplest differential, there’s a set of bevel gears with the propeller shaft with a pinion connected to the ring gear at the angle of 90°, with the ring gear carrying the differential cage. The rotating cage is fitted with two satellite gears, again at the right angle, which connect to planetary gears attached to the half-shafts, driving the wheels. As the whole device includes a number of gears, it is obvious that the gear ratios can be changed in various ways.
This is also used in motorsport – replacing the differential is quite an easy task for rally mechanics and it allows them to modify the car for various conditions. On a gravel stage with lots of turns and hairpins, they will use “short” differentials for best acceleration, on the tarmac rally with long straights, they will sacrifice some of the dynamics to increase the top speed and fit “long” differentials that allow the car to achieve higher speed at the same maximum engine revolutions.

Sounds complicated? Maybe, but that’s still the simplest possible differential. The locking differentials, limited-slip differentials or differentials with torque vectoring are orders of magnitude more complicated. The reason they exist is that the basic “open” differential has two significant disadvantages. For one, there are significant mechanical losses, but those happen in any mechanical device. It’s possible to minimize them, but you’ll never get rid of them.
For two, there is the “openness” of the differential. As a matter of principle, the differential transfers more torque to the wheel with lower friction (the outside one in turn). Imagine that you stop the car with one of the driven wheels on perfectly smooth ice and the other on dry, adhesive tarmac. You will not be able to get moving. At this situation, one of the wheel will spin helplessly, while the other will not even move.
In the day-to-day use of an ordinary car, such a scenario is rare and you can always cope with it, somehow, or plan around it. In the rough terrain, though, the priority is not the speed or precision handling, but ability to conquer the terrain and ruggedness. That’s why real off-road vehicles are fitted with locking differentials which, as the name suggests, can be locked and become the simple bevel gear set mentioned in the beginning.

Racing or rally cars, on the other hand, have to cope with low traction of the inside wheel – not to mention situations when the wheels are in the air. When you’re fighting for seconds, you can’t afford to lose your traction. And because handling is the everything to a racecar, limited-slip differentials are used. These use various engineering principles to prevent the slip inside the differential, thus transferring some torque to the wheel with lower traction as well, reacting smoothly to the conditions.
The extent to which the limited-slip differential can “lock” is measured in percent. The 0 % LSD is your garden variety open diff, the 100 % one is fully-locked one, or an axle without differential. A 50 % limited-slip differential means that the torque is divided in the ratio of 25 % to the wheel with lower traction and 75 % to the loaded one.
There are also systems that use modern technologies to simulate the effect of limited-slip differential. For example ŠKODA cars are equipped with XDS+, a system that uses car’s brakes to slow down the spinning wheel. Even the open differential then “thinks” it’s got some traction and transfers torque to that wheel. For spirited driving, though, the more complicated solution with mechanical limited-slip differential is still the better option. That’s why the fastest OCTAVIA, the RS245, uses advanced VAQ limited-slip differential on the front axle.
In the beginning, we mentioned that a car can have not only one differential, but two or even three. That’s the case of FABIA R5 rally car, which uses two. The rally FABIA is, of course, all wheel drive and thus needs differentials on both driven axles, because both of them need to solve the problem with different radiuses – even though ŠKODA Motorsport drivers take a lot of them with the pedal to the metal and all four wheels spinning.

With regard to specific use in rallying, the best solution for FABIA R5 is to use two differential and a rigid propshaft between the axles. There are, however, some cars that use the third differential to divide the torque between individual axles. In the past, most 4x4s had these central differentials, but with the advances of material engineering and electronics, the solution with friction coupling in its place became more popular, because it is not only able to mimic the function of the differential, but it can also decouple one axle if needed. This reduces the drivetrain losses and reduce the fuel consumption. The latest such systems with 7thgeneration Haldex coupling are used also by ŠKODA cars, like OCTAVIA 4X4 and SUPERB 4X4 or KAROQ and KODIAQ SUVs.